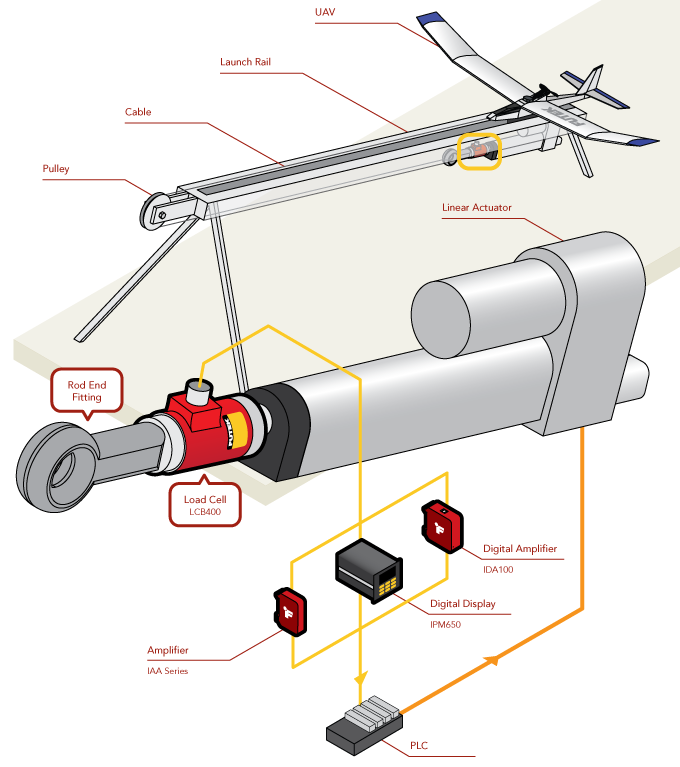
How it Works
- 1. The fixed end of an LCB400 Rod End Load Cell is mounted to the end of a linear actuator.
- 2. The active end of the LCB400 is then attached to the cable that will pull the UAV.
- 3. The actuator piston is then rapidly retracted, pulling the cable that will launch the aircraft into the air.
- 4. The LCB400 measures the force applied to the cable by the actuator.
- 5. The measurement from the LCB400 is sent to the digital display (IHH500, IPM650) or displayed on a PC with our SENSIT software(IDA100).
- 6. An amplified analog signal is then sent to the PLC controlling launcher and enabling force control.
- 7. Additionally, our SENSIT software can be used to log sensor output for our IPM650 and IDA100.