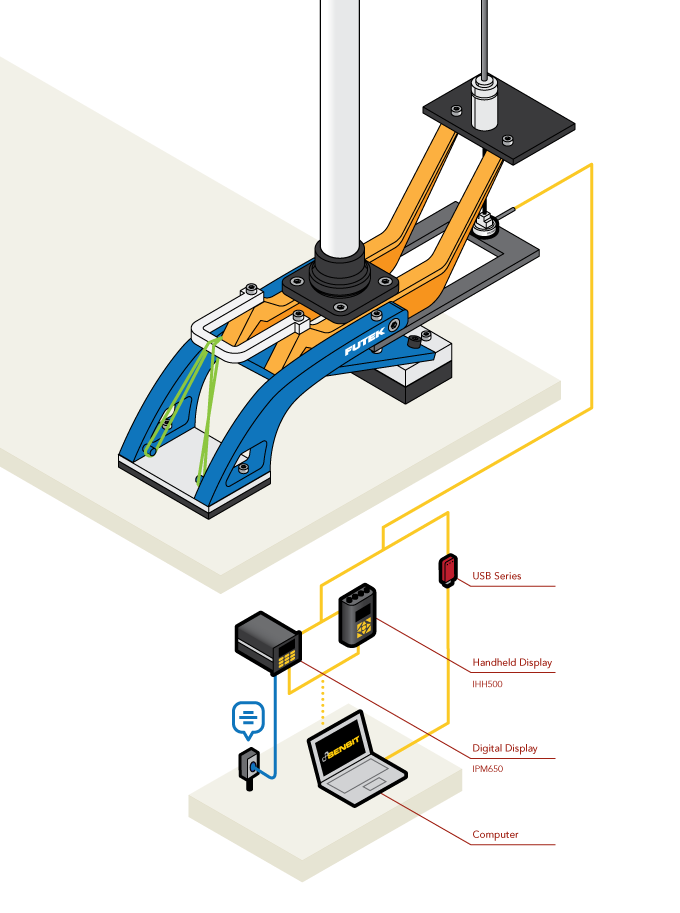
How it Works
- 1. One end of the LCM200 is attached to the control wire attached to the servo driven cable actuator.
- 2. The opposite end of the LCM200 is mounted into the heel of the prosthesis.
- 3. As the individual walks, the cable pulls on the heel of the prosthesis mimicking the torque generated in walking by an Achilles Tendon.
- 4. The force used to actuate the heel is measured by the LCM200 and displayed with the IPM650 Digital Panel Meter, IHH500 Handheld Display, or on a PC using the USB220 High Resolution Output Module and our SENSIT™ software.
- 5. The instruments are then connected to a PC over USB 2.0 which drives the servo motor, closing the control loop, and allowing the system to actively adapt to an individual’s gait.
- 6. With the IDA100, amplifier output can be simultaneously monitored and adjusted on a Windows PC with our SENSIT™ software while providing high speed, amplified, analog output for PLCs and Motion Controllers.