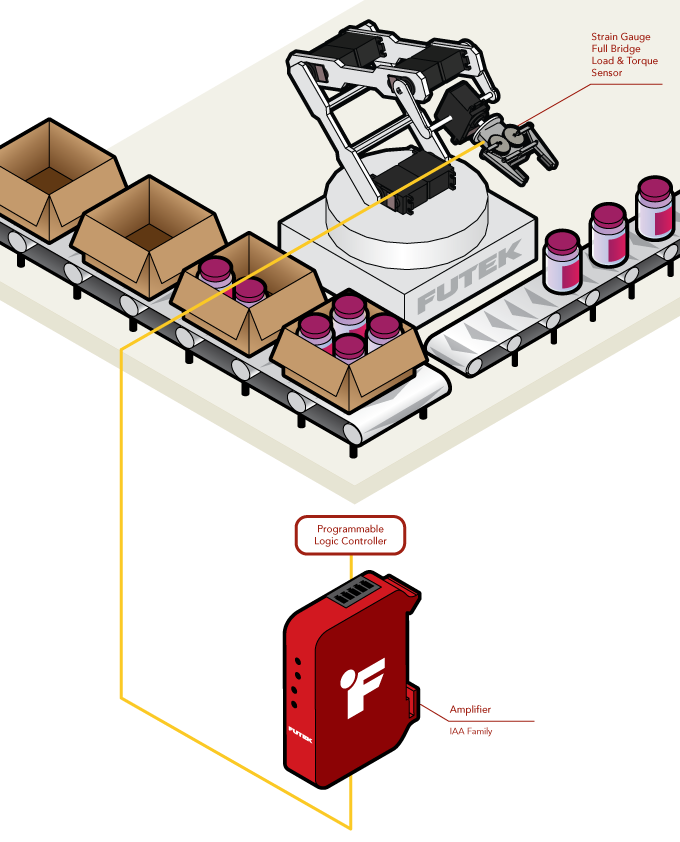
How it Works
- 1. In order to automate an industrial robotic arm, control engineers will program a PLC to specify response triggers.
- 2. In the above diagram, a full-bridge strain-gauge-based load and torque sensor resides within the claw of the robotic arm measuring torque and load of an object.
- 3. The IAA Series amplifies a mV/V signal coming from the strain-gauge-based sensor.
- 4. The output of the IAA amplifier will produce an accurate and low noise signal to the PLC to complete the feedback loop. (Because this application is utilizing a multiple channel sensor, the operations engineer will require one IAA amplifier per channel output.)